|
|
Paso 1. Hay aplicaciones con microbots que necesitan un giro completo de los motores. Ya se ha visto que los servomecanismos tienen un giro de 180 grados. Esta limitación viene impuesta por unos topes mecánicos y un circuito electrónico. Todo esto se puede anular para conseguir el giro completo buscado, pero es un proceso destructivo, es decir, no se podrá recuperar la funcionalidad original. |
|
|
Paso 2. Al quitar los cuatro tornillos posteriores se aprecia un circuito electrónico. Para poder extraerlo es necesario quitar el tornillo que une la rueda con el eje del motor. Una vez hecho esto se puede quitar la tapa superior del servomecanismo, dejando al descubierto unos engranajes blancos. |
|
|
Paso 3. Los engranajes blancos que se pueden apreciar en esta figura forman la caja reductora del servomecanismo. La misión de esta es proporcionar más par (fuerza) de salida en el eje del motor y reducir la velocidad del mismo. Para quitar el circuito electrónico se tiene que desmontar primero la caja reductora. Con mucho cuidado para no perder las piezas se irán quitando las pequeñas ruedas dentadas blancas. Atención con el pequeño eje situado en las dos ruedas intermedias. |
|
|
Paso 4. Una vez hecho lo anterior se puede presionar con un destornillador el saliente mecánico que se esconde debajo del engranaje más grande (eje de salida). Se observará cómo el circuito electrónico sobresale por debajo. Ahora se puede hacer palanca para extraerlo entero. En la figura se muestra la apariencia de ese circuito electrónico una vez extraído. Hay dos cilindros y un circuito integrado. Uno es el potenciómetro de control (en la figura a la izquierda), el otro es el motor (En la figura a la derecha). |
|
|
Paso 5. Ha llegado el momento de empezar a transformar el servomecanismo. Hasta ahora el proceso no ha sido destructivo, pero a partir de aquí sí lo será. Lo primero que hay que hacer es desoldar el motor, será la única parte que se reutilice, el resto no se va a necesitar. El potenciómetro establece junto con el chip la limitación de giro electrónica. Al quitar ambos componentes se elimina dicha limitación. |
|
|
Paso 6. El cable triple que sale del circuito electrónico se puede cortar para utilizarlo en otras aplicaciones. Es muy útil debido al conector triple que tiene en su extremo. Por ejemplo se puede usar para conectar los sensores de infrarrojos a la tarjeta CT293+. En la figura se observa el circuito totalmente desmontado. El potenciómetro se puede reutilizar en otras aplicaciones, por eso no viene mal guardarlo, nunca se sabe. |
|
|
Paso 7. Antes de volver a colocar el motor en su sitio se deben soldar dos cablecillos en sus bornas de alimentación. Se recomienda usar un cable rojo y otro negro, el primero se soldará a la borna positiva (la que tiene el punto rojo) y el segundo a la negativa. La diferenciación no importa en el caso de microbots móviles, pero en aplicaciones que impliquen un solo sentido de giro del motor sí. Conviene hacer coincidir la polaridad de la fuente de alimentación con la del motor, de esa forma la vida útil del mismo será mayor. |
|
|
Paso 8. Ahora se elimina la limitación mecánica. Esta consiste en un pequeño saliente situado en el engranaje que forma el eje de salida del servomecanismo. En la figura se puede apreciar dicho engranaje y la situación del saliente. Para cortarlo se pueden emplear unas pinzas, lima, etc... lo importante es no dañar las muescas de la rueda dentada, o peor aún partir el eje. En caso de que esto ocurra se puede intentar pegar con 'Super Glue 3'. |
|
|
Paso 9. Una vez eliminado el saliente se recomienda limar la zona para que no queden rugosidades, es decir que parezca que nunca hubo un saliente. La razón es evitar rozamientos innecesarios una vez montada la reductora. Cuantos más rozamientos más ruido y más pérdida de energía mecánica. |
|
|
Paso 10. Una vez realizado lo anterior se procede a montar el servomecanismo. Lo primero es introducir el motor en el hueco cilíndrico que hay en el interior de la carcasa negra, es decir del lugar de dónde salió. |
|
|
Paso 11. Una vez introducido se monta la caja reductora, para ello fijarse en la figura, sobretodo tener cuidado con la posición que deben tener los engranajes y nunca forzar su colocación. La tapa superior debe entrar sin ningún problema, en caso contrario revisar los engranajes. |
|
|
Paso 12. Por último se atornilla la tapa inferior, pero antes conviene hacer un pequeño nudo en los cablecillos del motor, y dejar dicho nudo en el interior. Este protegerá las soldaduras hechas al motor cuando se produzcan tirones en los cablecillos. |
|
|
Paso 13. En la figura se aprecia el aspecto del servomecanismo trucado. La primera diferencia respecto al principio está en el cable de conexión, ahora no es triple sino doble. Pero la más importante es que ahora puede girar contínuamente, es decir giros completos de 360 grados. Llegado a este punto se tendrán preparados los motores del microbot y se podrá abordar la construcción de la estructura mecánica. |













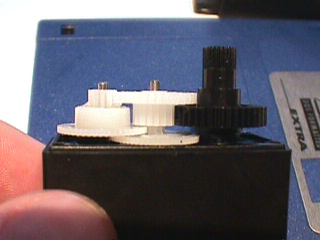
Detalles de los engranajes
En la siguiente figura se pueden apreciar con más detalle el conjunto de engranajes que forman la caja reductora del servo Futaba 3003. En total hay 4. El que está conectado al eje de salida del servo es el que tiene el tope a eliminar. En algunos servos es de color negro (como en este caso) pero en otros es blanco (fotos anteriores).